A nuvem de pontos densa é o núcleo do fluxo de trabalho fotogramétrico no Agisoft Metashape. É o produto a partir do qual quase tudo o mais é derivado: a malha 3D, o modelo digital de elevação, o ortomosaico e as medições volumétricas. Processá-la corretamente — escolhendo os parâmetros certos, editando o resultado e exportando no formato adequado — faz toda a diferença entre um modelo preciso e um cheio de ruído e falhas. Este guia orienta você em cada etapa do processo.
O que é uma nuvem de pontos densa?
Uma nuvem de pontos densa é uma coleção de milhões de pontos tridimensionais, cada um com coordenadas XYZ e valores de cor RGB, representando a geometria da cena fotografada. Ela é gerada a partir dos mapas de profundidade que o Metashape calcula para cada imagem após o alinhamento das câmeras.
Ao contrário da nuvem de pontos esparsa gerada na fase de alinhamento (com dezenas de milhares de pontos), a nuvem densa pode conter de centenas de milhares a centenas de milhões de pontos, dependendo da quantidade e resolução das imagens e dos parâmetros de qualidade escolhidos.
Passo 1: Certifique-se de que as câmeras estejam devidamente alinhadas.
Uma nuvem de pontos densa só pode ser gerada após o alinhamento das fotos. Se as câmeras não estiverem alinhadas corretamente, a nuvem de pontos densa refletirá esses erros de forma amplificada: lacunas, superfícies duplas, ruído excessivo.
Antes de prosseguir, verifique estes indicadores na nuvem esparsa:
- Erro de reprojeção: deve ser inferior a 1 pixel . Você pode ver isso no relatório de processamento ( Ferramentas → Relatório de Processamento ).
- Cobertura de alinhamento da câmera: pelo menos 90% das fotos importadas devem estar alinhadas. Se a porcentagem for menor, verifique a qualidade da imagem e a sobreposição.
- Distribuição das câmeras: Na visualização 3D, as posições das câmeras devem formar a trajetória esperada, sem câmeras “soltas” ou muito distantes do grupo.
Se o erro de reprojeção for maior que 1 pixel, otimize as câmeras antes de continuar: Ferramentas → Otimizar Câmeras . Ative os parâmetros f, cx, cy, k1, k2, k3 e p1, p2 para obter melhores resultados.
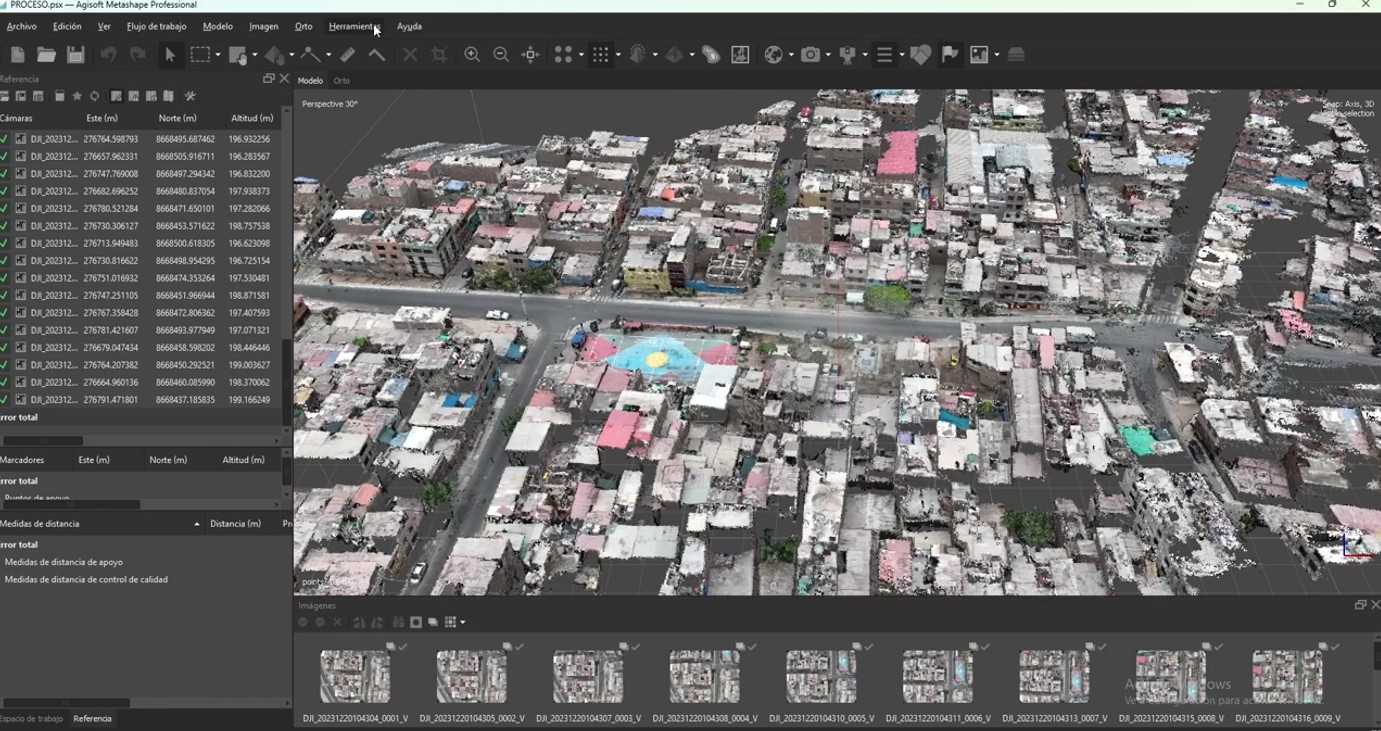
📷 Ideia de Imagem (IA): Vista 3D de uma nuvem de pontos dispersa com as posições da câmera representadas por pequenos ícones formando um caminho em forma de U sobre um objeto, estilo de visualização técnica em um fundo escuro.
Etapa 2: Gere a nuvem de pontos densa
Com as câmeras alinhadas, vá para:
Fluxo de trabalho → Criar nuvem de pontos densa
A caixa de diálogo de configuração é aberta com os seguintes parâmetros principais:
Qualidade
A qualidade determina a resolução com que as imagens são processadas para calcular os mapas de profundidade.
| Qualidade | Resolução de processamento | Tempo estimado* | Quando usar |
|---|---|---|---|
| Ultra Alto | Resolução original (1:1) | Muito longo | Objetos pequenos, máximo detalhe, patrimônio cultural |
| Alto | Metade da resolução (1:2) | Longo | Projetos profissionais padrão, levantamentos topográficos |
| Média | Um quarto da resolução (1:4) | Moderado | Projetos de grande porte, primeira avaliação |
| Baixo | Um oitavo da resolução (1:8) | Curto | Somente para testes rápidos |
| Mais baixo | Um décimo sexto (1:16) | Muito curto | Somente diagnóstico |
*O tempo varia consideravelmente dependendo do hardware, especialmente da GPU e da RAM disponíveis.
Recomendação prática: Para a maioria dos projetos profissionais, a qualidade Alta representa o equilíbrio ideal entre qualidade e tempo de processamento. A qualidade Ultra Alta só se justifica quando o nível de detalhe milimétrico é crucial ou quando o objeto é pequeno e há poucas imagens.
Filtragem de profundidade
Controla como os pontos inconsistentes ou ruidosos são tratados durante a geração.
| Filtrado | Quando usar |
|---|---|
| Leve | Superfícies complexas, vegetação, objetos irregulares. Preserva mais detalhes, incluindo arestas finas. |
| Moderado | Uso geral. Bom equilíbrio entre densidade e limpeza. |
| Agressivo | Superfícies lisas e regulares, como interiores, trilhos ou terrenos abertos. Remove mais ruído, mas pode resultar em perda de detalhes finos. |
Calcule o nível de confiança do ponto.
Habilitar esta opção ( Calcular confiança do ponto ) atribui a cada ponto um valor de confiança (0–255) que indica a confiabilidade do cálculo da sua posição. Isso é muito útil se você pretende filtrar pontos de baixa qualidade após o processamento. Recomenda-se sempre habilitar esta opção.
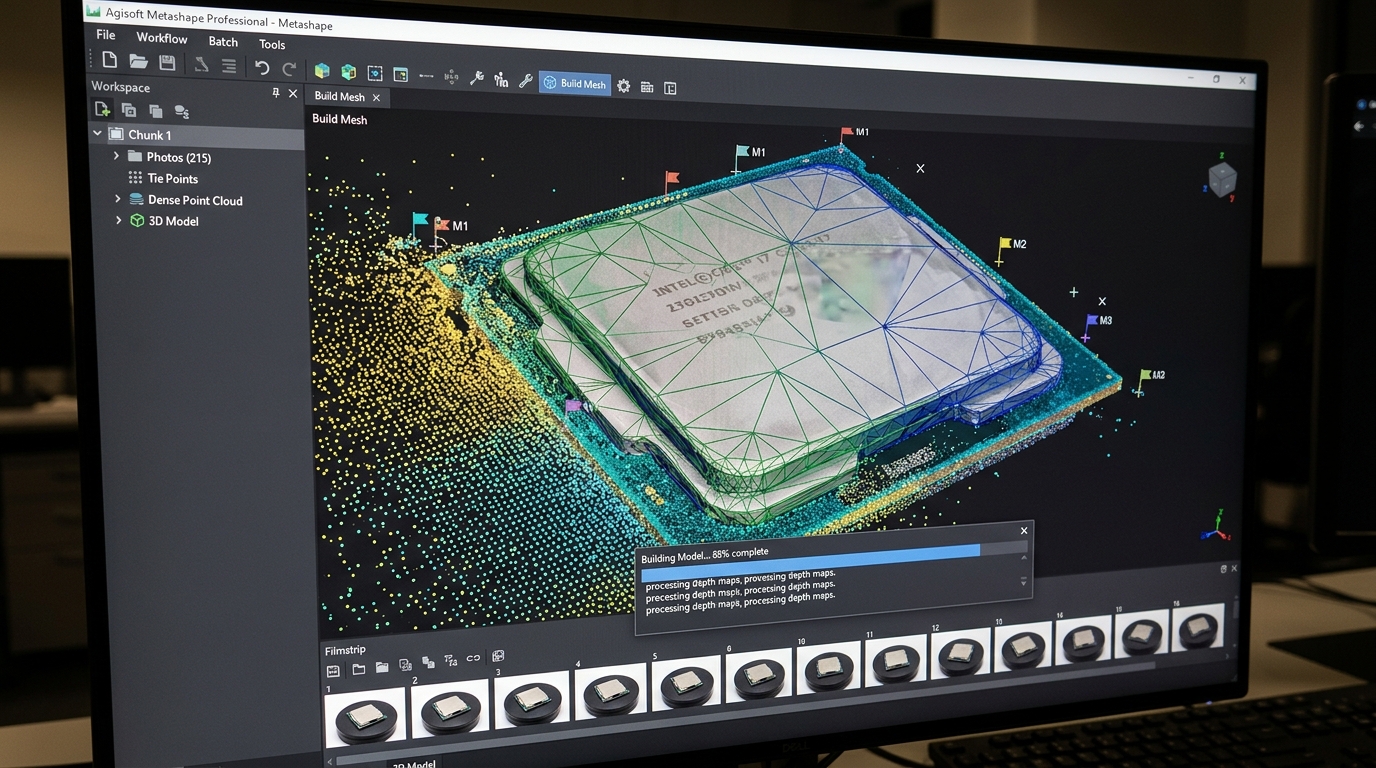
📷 Ideia de imagem (IA): Captura estilizada da caixa de diálogo de configurações “Construir Nuvem de Pontos Densa” do Metashape, com os parâmetros visíveis, em um fundo escuro da interface.
Etapa 3: Avalie a nuvem de pontos gerada.
Assim que o processamento estiver concluído, antes de prosseguir para a próxima etapa, examine a nuvem densa:
O que procurar:
- Cobertura completa: toda a área de interesse deve estar representada sem lacunas significativas.
- Densidade uniforme: a densidade dos pontos deve ser homogênea. Áreas mais claras ou dispersas indicam problemas de sobreposição ou superfícies problemáticas.
- Ausência de artefatos óbvios: pontos flutuantes, superfícies duplicadas ou “fantasmas” de objetos em movimento.
Se você encontrar problemas sérios de cobertura, a solução mais eficaz é adicionar mais fotos das áreas deficientes e processá-las novamente. Se o problema for ruído, a edição manual (próximo passo) pode resolvê-lo.
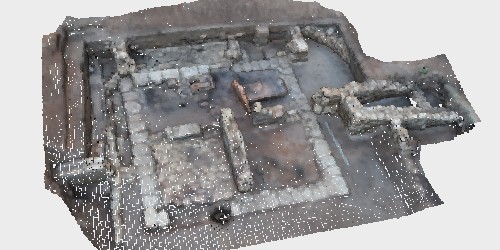
📷 Ideia de imagem (IA): Nuvem de pontos densa de um edifício ou ponte histórica, milhões de pontos com gradiente de cores RGB sobre um fundo preto, estilo de visualização científica.
Etapa 4: Editar a nuvem de pontos (limpeza)
O Metashape oferece ferramentas para editar manualmente a nuvem de pontos densa e remover pontos indesejados antes de gerar produtos derivados.
Seleção manual
Utilize as ferramentas de seleção na barra de ferramentas:
- Retângulo / Laço / Polígono: selecione pontos dentro de uma área desenhada na visualização 3D.
- Seleção livre: permite desenhar uma região de seleção irregular.
Depois de selecionar os itens que deseja excluir, pressione Delete para apagá-los. Isso é ideal para remover:
- Pontos no terreno que não fazem parte do objeto de interesse.
- Vegetação ao redor de uma estrutura
- Pontos gerados por objetos em movimento (pessoas, veículos)
- Nuvens de pontos de áreas fora da área de trabalho
Dica: Antes de editar, duplique o bloco ( clique com o botão direito do mouse no bloco → Duplicar bloco ). Dessa forma, você poderá reverter as alterações caso algo dê errado, sem precisar reprocessar tudo.
Filtrado por confiança
Se você ativou a opção “Calcular a confiança do ponto” na etapa anterior, poderá filtrar rapidamente os pontos menos confiáveis:
Ferramentas → Nuvem de Pontos Densa → Filtrar por Confiança
Ajuste o limite mínimo de confiança (por exemplo, remova todos os pontos com menos de 2 de confiança) para eliminar automaticamente o ruído sem intervenção manual ponto a ponto.
📷 Ideia de imagem (IA): Comparação lado a lado: à esquerda, nuvem de pontos com ruído e pontos flutuantes; à direita, a mesma nuvem limpa e uniforme, fundo escuro, estilo técnico.
Etapa 5: Classificar a nuvem de pontos (Somente para profissionais)
A classificação é um dos recursos mais poderosos do Metashape Professional. Ela permite atribuir uma categoria semântica a cada ponto, de modo que os produtos derivados (especialmente DEM/DTM) possam ser gerados apenas a partir de pontos relevantes.
Ferramentas → Nuvem de Pontos Densa → Classificar Pontos Terrestres
Tipos de pontos disponíveis
| Aula | Descrição |
|---|---|
| Chão | pontos de solo exposto |
| Vegetação rasteira | Gramado, arbustos baixos |
| Vegetação média | Arbustos de porte médio |
| Vegetação alta | Árvores |
| Edifícios | Estruturas construídas |
| Não classificado | Pontos não atribuídos a nenhuma classe |
Parâmetros de classificação do terreno
| Parâmetro | Descrição |
|---|---|
| Ângulo máximo | Inclinação máxima do terreno (em graus). Aumentar esse valor permite classificar áreas mais íngremes como terrenos acidentados. |
| Distância máxima | Distância máxima entre pontos no terreno e a área estimada |
| tamanho da célula | Resolução da grade de análise. Valores menores = maior precisão, mais tempo. |
Após a classificação automática, você pode refinar manualmente usando as ferramentas de seleção para reclassificar pontos individuais ou regiões específicas.
A classificação dos pontos do terreno é essencial para gerar um DTM (Modelo Digital do Terreno) que representa apenas o solo, sem vegetação ou edificações, ao contrário do DSM (Modelo Digital de Superfície), que inclui tudo.
📷 Ideia de imagem (IA): Nuvem de pontos classificada por cores de acordo com a classe: marrom para terreno, verde para vegetação, cinza para edifícios, em um fundo preto, estilo GIS profissional.
Etapa 6: Exporte a nuvem de pontos.
Com os dados na nuvem processados, editados e classificados, a etapa final é exportá-los para o formato apropriado para o software de destino.
Arquivo → Exportar → Exportar nuvem de pontos
Formatos de exportação disponíveis
| Formatar | Extensão | Quando usar |
|---|---|---|
| O | .las | Padrão da indústria para nuvens de pontos geoespaciais. Compatível com ArcGIS, QGIS, CloudCompare e AutoCAD Civil 3D. |
| LAZ | .laz | Versão compactada do LAS. Mesmo conteúdo, até 10 vezes menos espaço em disco. |
| COMPENSAÇÃO | .ply | Para uso em softwares 3D (Blender, MeshLab) |
| XYZ / TXT | .txt | Formato de texto simples, coordenadas separadas por espaços ou vírgulas. Compatível com quase tudo. |
| PTS | .pts | Compatível com software de digitalização a laser (Leica Cyclone, etc.) |
| E57 | .e57 | Padrão para dados de digitalização 3D, compatível com softwares BIM e de topografia. |
Opções de exportação importantes
Sistema de coordenadas: Se o projeto for georreferenciado (com GCPs ou GPS), escolha o sistema de referência correto para o destino. Na Argentina, os mais comuns são o WGS84, o POSGAR 07 ou as projeções de Gauss-Krüger correspondentes.
Salvar cores: Ative esta opção para preservar os valores RGB de cada ponto, essenciais para a visualização.
Salvar classes de pontos: Se você classificou a nuvem, ative esta opção para que as classes sejam salvas no arquivo LAS/LAZ exportado e sejam reconhecidas pelo software de destino.
Salvar confiança: exporte o valor de confiança como um atributo adicional de cada ponto.
Erros comuns e como corrigi-los
A nuvem densa apresenta muitas falhas. Causa mais frequente: sobreposição insuficiente entre as imagens. Também pode ser devido a superfícies sem textura (água, vidro, metal polido) ou áreas fotografadas de um único ângulo. Solução: adicione fotos complementares das áreas problemáticas e reprocesse a imagem.
A nuvem apresenta muito ruído ou objetos flutuantes. Causa: imagens de baixa qualidade, movimento durante a captura, reflexos ou áreas com pouca luz. Solução: utilize filtragem de profundidade Moderada ou Agressiva, filtre por confiança e faça a limpeza manualmente com ferramentas de seleção.
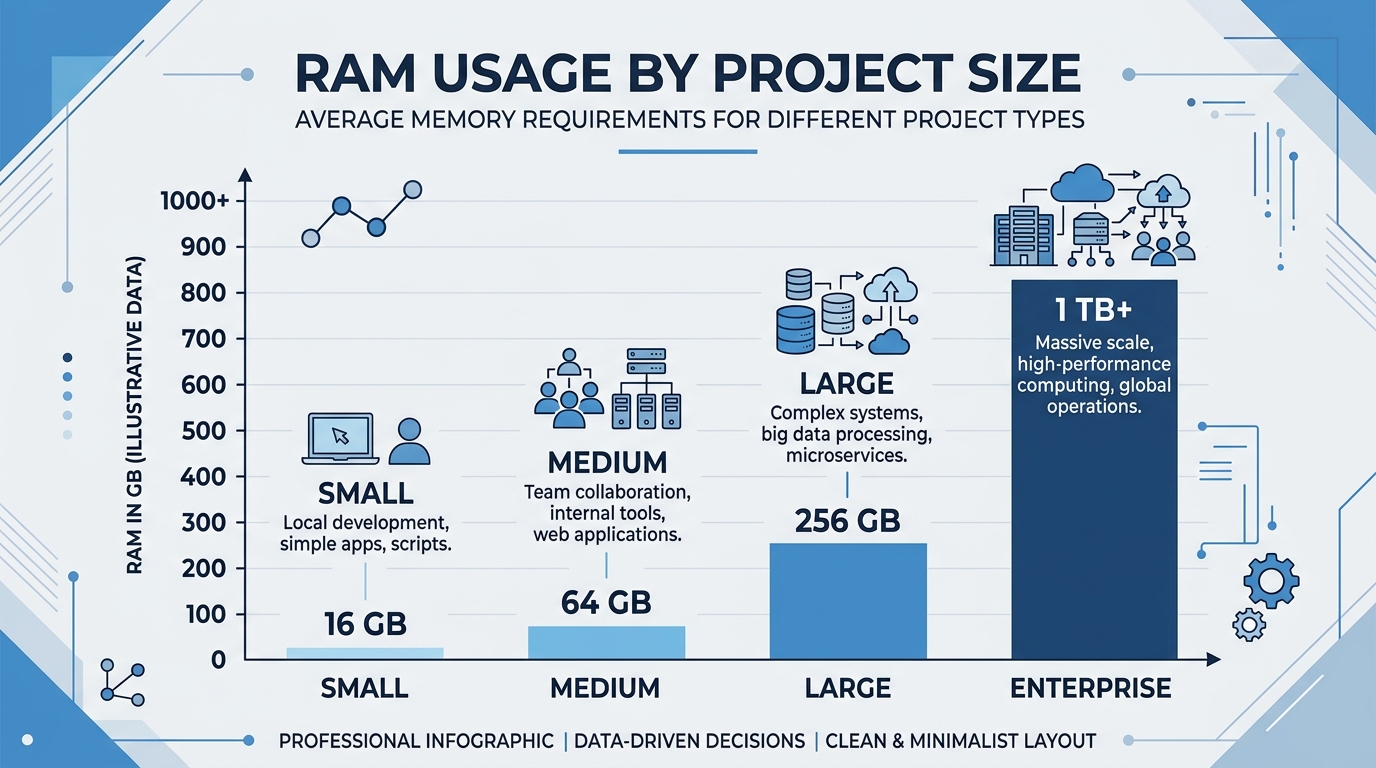
O processamento está muito lento ou o computador está sem memória. Causa: O projeto é muito grande para o hardware disponível ou a configuração de qualidade está muito alta. Solução: Reduza a qualidade para Média, divida o projeto em partes menores ou adicione mais memória RAM ao computador.
A classificação de terreno não funciona bem em áreas com vegetação densa. Causa: Em florestas ou áreas com cobertura vegetal muito densa, poucos feixes de laser (ou fotogramétricos) atingem o solo real. Solução: Ajuste o ângulo máximo e o tamanho da célula e complemente com classificação manual nas áreas problemáticas.
Os pontos exportados não possuem coordenadas corretas. Causa: O projeto não foi georreferenciado com pontos de controle terrestre (GCPs) ou o sistema de coordenadas de exportação não corresponde ao esperado. Solução: Verifique se os GCPs estão corretamente marcados e se o sistema de coordenadas no painel Referência está correto antes de exportar.
Conclusão
Processar corretamente uma nuvem de pontos no Metashape vai muito além de simplesmente apertar um botão. Escolher a qualidade adequada para o projeto, limpar pontos problemáticos, classificar o terreno para projetos de SIG e exportar no formato correto são decisões que impactam diretamente a qualidade de todos os produtos resultantes.
Se você está começando a trabalhar com fotogrametria ou avaliando se o Agisoft Metashape se encaixa no seu fluxo de trabalho, na Aufiero Informática podemos te aconselhar sem compromisso.
👉 Veja as licenças do Agisoft Metashape na Aufiero Informática
Perguntas frequentes
Quanto tempo leva para gerar uma nuvem de pontos densa? Depende do hardware e das configurações. Para referência, 300 fotos a 20 MP em alta qualidade com uma GPU RTX 4070 levam aproximadamente de 45 a 90 minutos. Em qualidade ultra alta, esse tempo pode triplicar.
Posso gerar uma nuvem densa sem uma GPU? Sim, mas a diferença de velocidade é muito significativa. A GPU acelera o cálculo dos mapas de profundidade, que é a operação mais intensiva nesta etapa. Sem uma GPU dedicada, projetos de médio porte podem levar muitas horas.
A tecnologia de nuvens de pontos densas substitui a digitalização LiDAR? Para muitas aplicações, sim, especialmente quando os dados não são necessários sob vegetação densa. A fotogrametria gera nuvens de pontos texturizadas (cor RGB por ponto), algo que o LiDAR não faz por padrão. No entanto, para penetração na copa das árvores, o LiDAR continua sendo superior.
Posso editar a nuvem de pontos densa depois de gerar a malha? Sim, a nuvem de pontos e a malha são produtos separados. Você pode editar a nuvem de pontos e regenerar a malha sem precisar realinhar as fotos.
Qual a diferença entre DSM e DTM? O DSM (Modelo Digital de Superfície) inclui todos os objetos no solo: edifícios, vegetação, infraestrutura. O DTM (Modelo Digital de Terreno) representa apenas o solo exposto e é gerado a partir de pontos classificados como “terreno” na nuvem de pontos.