Você tira fotos de diferentes ângulos, as carrega em um software como o Agisoft Metashape, aperta um botão e, logo em seguida, um modelo tridimensional preciso aparece. Parece mágica, mas por trás disso existe um fascinante processo matemático e computacional. Neste artigo, explicamos exatamente o que acontece dentro do software: da primeira imagem ao modelo 3D final.
O ponto de partida: do que o software precisa?
Para reconstruir uma cena 3D, o software precisa de pelo menos duas fotografias do mesmo objeto ou área, tiradas de posições diferentes . Na prática, dezenas, centenas ou até milhares de imagens são usadas para obter maior precisão e cobertura.
O requisito fundamental é a sobreposição : cada ponto do objeto ou terreno deve aparecer em pelo menos duas imagens, e quanto mais, melhor. Em fotogrametria aérea, recomenda-se uma sobreposição frontal de 80% e uma sobreposição lateral de 60% entre as imagens.
As etapas do processo de reconstrução 3D
Etapa 1 — Detecção de Pontos de Referência (SIFT)
Tudo começa com a busca por características distintivas em cada imagem: cantos, bordas, texturas, contrastes. O algoritmo mais utilizado para isso é o SIFT ( Scale-Invariant Feature Transform ), desenvolvido por David Lowe, que detecta pontos reconhecíveis independentemente do ângulo, escala ou condições de iluminação em que a foto foi tirada.
Na prática, o Metashape detecta dezenas de milhares desses pontos por imagem. Cada ponto é descrito por um “descritor” matemático que representa seu ambiente visual.
Analogia: É como se o software identificasse pontos de referência únicos em cada foto — uma mancha de tinta, a borda de uma janela, uma rachadura no chão — e os memorizasse para poder reconhecê-los em outras fotos.
Etapa 2 — Correspondência de Imagens
Utilizando os descritores calculados, o software procura pontos em uma imagem que correspondam a pontos em outras imagens . Isso é chamado de correspondência de características .
O resultado é uma rede de correspondências: o ponto A na foto 1 é o mesmo ponto físico que o ponto B na foto 3 e o ponto C na foto 7. Quanto maior a sobreposição entre as fotos, mais correspondências são detectadas e mais robusto é o modelo resultante.
Fatores que dificultam a correspondência incluem superfícies uniformes (sem textura), reflexos, áreas muito escuras ou muito brilhantes e objetos em movimento durante a captura.
Etapa 3 — Estrutura a partir do Movimento (SfM): posição da câmera e nuvem de pontos dispersos
Com as correspondências estabelecidas, entra em ação o algoritmo central: Estrutura a partir do Movimento (SfM , na sigla em inglês).
O SfM resolve dois problemas simultaneamente:
- De onde cada foto foi tirada? → Calcule a posição e a orientação exatas da câmera no momento de cada foto.
- Onde se encontra cada ponto no espaço? → Triangule a posição 3D de cada ponto coincidente entre as imagens.
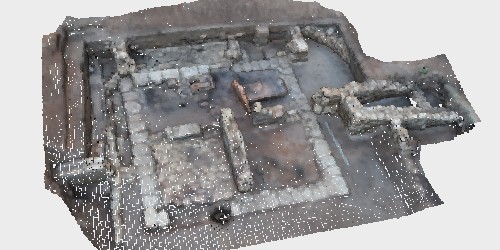
O resultado desta etapa é uma nuvem de pontos esparsa : milhares de pontos flutuando no espaço que começam a delinear a forma do objeto ou terreno. Ela ainda não é densa ou detalhada, mas já define a geometria geral e a posição relativa de todas as câmeras.
Este processo também inclui o Ajuste de Feixe : uma otimização matemática que ajusta simultaneamente as posições de todas as câmeras e todos os pontos para minimizar o erro de reprojeção. É computacionalmente intensivo, mas essencial para a precisão final.
Etapa 4 — Estereoscopia Multivisual (MVS): nuvem de pontos densa
Assim que a posição exata de cada câmera é conhecida, o software aplica a tecnologia Multi-View Stereo (MVS) para gerar uma nuvem de pontos densa .
O MVS analisa cada par de imagens como um sistema estereoscópico: usando a geometria conhecida das câmeras, ele calcula a profundidade de cada pixel em cada imagem. O resultado é uma nuvem com milhões ou dezenas de milhões de pontos, cada um com coordenadas XYZ precisas e valores de cor RGB.
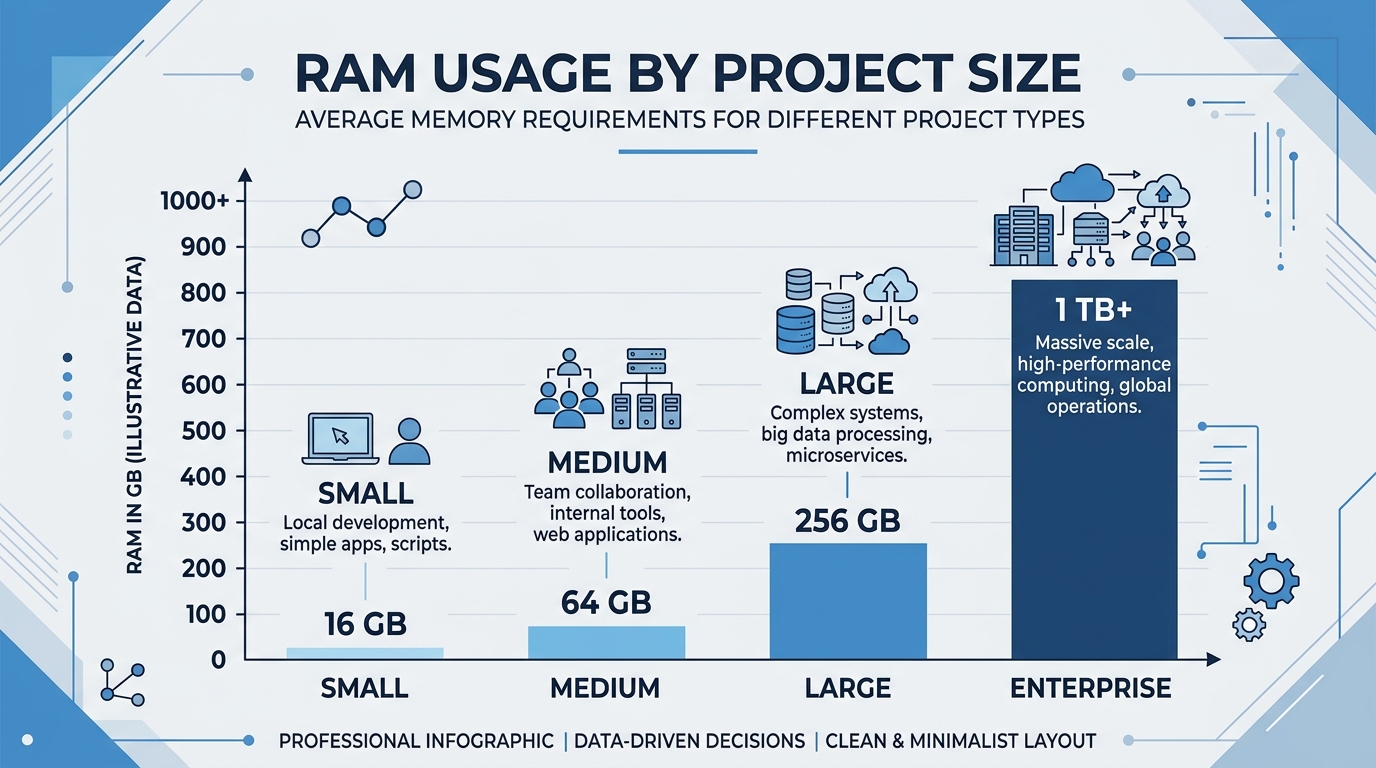
Esta é a etapa mais exigente em termos de hardware: requer muita RAM e se beneficia bastante da aceleração por GPU. Um projeto com 500 fotos pode gerar uma nuvem de pontos com mais de 100 milhões de pontos.
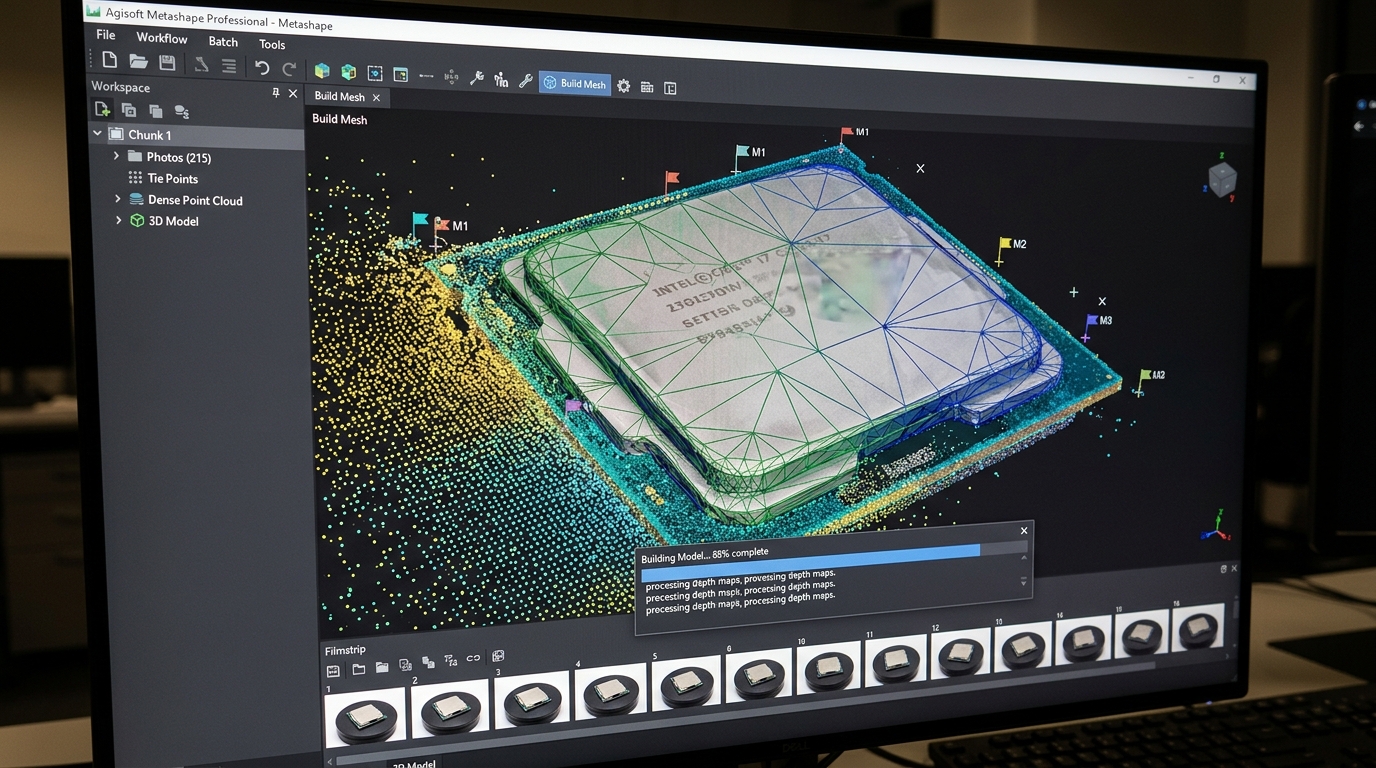
Etapa 5 — Geração de malha
Uma nuvem de pontos é uma coleção de pontos isolados. Para obter uma superfície contínua e fechada, o software aplica algoritmos de reconstrução de superfície que conectam os pontos e geram uma malha poligonal : uma rede de triângulos que define a forma do objeto.
No Metashape, esta etapa pode ser configurada com diferentes níveis de detalhe (baixo, médio, alto, ultra-alto), dependendo da necessidade e dos recursos de hardware disponíveis.
Etapa 6 — Texturização
A malha possui a geometria correta, mas ainda parece um modelo cinza e sem cor. Na etapa de texturização , o software projeta as fotografias originais sobre a malha para gerar uma textura fotorrealista .
O resultado é um modelo 3D que não só possui a forma exata do objeto real, como também sua aparência visual completa: cores, materiais, detalhes da superfície.
Etapa 7 — Georreferenciamento (Somente para profissionais)
Em fluxos de trabalho topográficos ou de mapeamento, uma etapa adicional é adicionada: o georreferenciamento . Utilizando pontos de controle terrestre (GCPs) com coordenadas reais conhecidas (levantadas com GPS de precisão), o software transforma o modelo de um sistema de coordenadas relativas para um sistema absoluto, expresso em um sistema de referência geográfica real (por exemplo, WGS84 ou POSGAR 07 na Argentina).
Esta etapa permite obter ortofotos, modelos de elevação e nuvens de pontos com coordenadas métricas reais, adequadas para uso em SIG (Sistemas de Informação Geográfica), topografia e cartografia oficial.
Os produtos finais que o processo pode gerar
Dependendo do software e das etapas realizadas, o processo de reconstrução 3D pode gerar:
| Produto | Descrição | Principais usos |
|---|---|---|
| Nuvem de pontos densa | Milhões de pontos XYZ coloridos | Levantamento topográfico, inspeção, arquivamento |
| Malha 3D texturizada | Modelo poligonal com textura fotorrealista | Visualização, patrimônio, videogames |
| Ortomosaico | Fotografia aérea geometricamente corrigida | Cartografia, SIG, agricultura |
| DEM / DTM | Modelo digital de elevação do terreno | Topografia, hidrologia, volumes |
| Linhas de contorno | isolinhas de altura | Planos topográficos, construção |
Que fatores afetam a qualidade do resultado?
A qualidade do modelo 3D final depende de diversas decisões tomadas antes e durante a captura:
Sobreposição de imagens: maior sobreposição = mais pontos em comum = modelo mais robusto. Mínimo recomendado: 70-80% frontal e 60% lateral.
Textura da superfície: superfícies com textura rica (pedra, terra, vegetação) são reconstruídas muito melhor do que superfícies lisas, brilhantes ou uniformes (vidro, água, metal polido).
Iluminação: Uma luz uniforme e difusa facilita a detecção de pontos. Sombras fortes ou brilho direto dificultam a correspondência.
Resolução da imagem: Uma resolução mais alta significa mais detalhes no modelo final. No entanto, uma resolução mais alta também significa um tempo de processamento maior.
Número de fotos: Mais fotos permitem cobrir áreas sem sobreposição, melhorar a precisão e solucionar problemas.
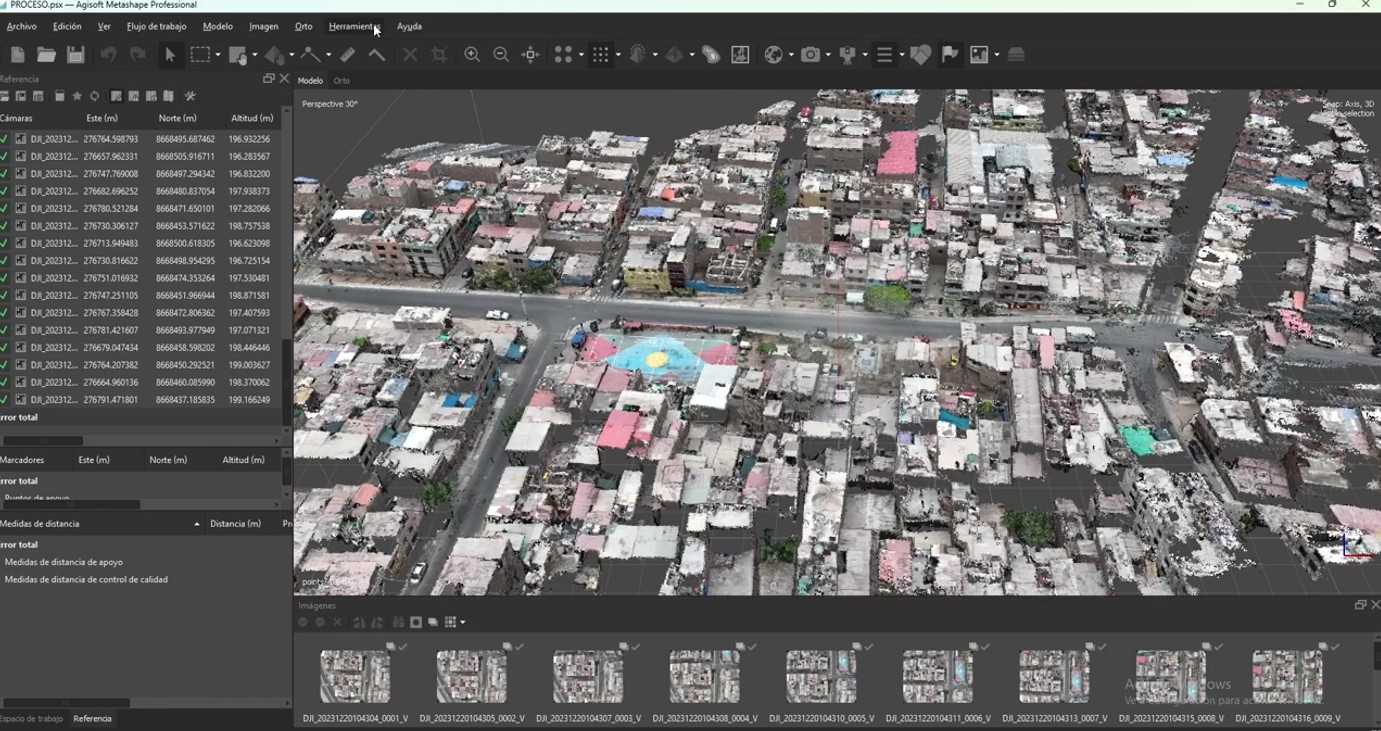
Como o Agisoft Metashape faz isso?
O Metashape implementa cada uma dessas etapas de forma integrada em uma única interface, com parâmetros configuráveis para cada etapa. O fluxo de trabalho típico no Metashape é:
- Carregar imagens para o projeto
- Alinhar fotos → realiza detecção SIFT, correspondência e SfM → gera nuvem de dispersão
- Construir nuvem densa → executar MVS → gerar nuvem densa
- Construir malha → gera superfície poligonal
- Criar textura → projeta fotos na malha
- (Somente para profissionais) Configurar GCPs → Exportar para formatos GIS
Cada etapa é configurável em termos de qualidade e parâmetros avançados, permitindo equilibrar precisão e tempo de processamento de acordo com as necessidades do projeto.
Conclusão
A reconstrução de imagens 3D não é mágica: é matemática, geometria e visão computacional trabalhando juntas. Compreender como cada etapa funciona — da detecção SIFT à texturização final — permite melhores decisões na captura de imagens, configurações de software mais inteligentes e a antecipação de problemas antes que eles surjam.
Se você deseja aplicar esse processo ao seu trabalho com o Agisoft Metashape, na Aufiero Informática podemos ajudá-lo a escolher a licença adequada e orientá-lo nos primeiros passos.
👉 Conheça o Agisoft Metashape na Aufiero Informática
Perguntas frequentes
Quantas fotos são necessárias para reconstruir um objeto em 3D?
Isso depende do tamanho e da complexidade do objeto. Para um objeto pequeno (uma peça arqueológica, por exemplo), 50 a 100 fotos bem tiradas podem ser suficientes. Para um edifício inteiro, são necessárias várias centenas, e para um levantamento topográfico em grande escala, milhares.
Qual a diferença entre SfM e fotogrametria tradicional?
A fotogrametria clássica exigia câmeras calibradas com precisão e posições de captura altamente controladas. O SfM automatiza a calibração da câmera e a determinação da posição a partir das próprias imagens, tornando-o muito mais acessível e flexível.
Por que o vidro e a água não combinam bem?
Porque são superfícies especulares: refletem a luz de maneira diferente dependendo do ângulo de visão, o que faz com que o mesmo ponto pareça diferente em cada foto. O algoritmo de correspondência não consegue estabelecer correspondências confiáveis nessas condições.
Quanto tempo leva para processar um modelo 3D?
Isso varia bastante dependendo da quantidade de fotos, da resolução e do hardware. Um projeto pequeno (100 fotos) pode levar 30 minutos em um computador moderno. Um projeto grande (2.000 fotos de alta qualidade) pode exigir várias horas ou até mesmo a noite toda para o processamento.