La nube de puntos densa es el corazón del flujo de trabajo fotogramétrico en Agisoft Metashape. Es el producto del que se deriva casi todo lo demás: la malla 3D, el modelo digital de elevación, el ortomosaico y las mediciones volumétricas. Procesarla correctamente —eligiendo los parámetros adecuados, editando el resultado y exportando en el formato correcto— marca la diferencia entre un modelo preciso y uno lleno de ruido y huecos. Esta guía te lleva por cada etapa del proceso.
¿Qué es una nube de puntos densa?
Una nube de puntos densa (dense point cloud) es una colección de millones de puntos tridimensionales, cada uno con coordenadas XYZ y valores de color RGB, que representa la geometría de la escena fotografiada. Se genera a partir de los mapas de profundidad que Metashape calcula para cada imagen una vez que las cámaras están alineadas.
A diferencia de la nube de puntos dispersa que se genera en la etapa de alineación (con decenas de miles de puntos), la nube densa puede contener desde cientos de miles hasta cientos de millones de puntos, según la cantidad y resolución de las imágenes y los parámetros de calidad elegidos.
Paso 1: Asegurate de tener las cámaras bien alineadas
La nube de puntos densa solo puede generarse después de la alineación de fotos. Si las cámaras no están bien alineadas, la nube densa va a reflejar esos errores de forma amplificada: huecos, superficies dobles, ruido excesivo.
Antes de avanzar, verificá estos indicadores en la nube dispersa:
- Error de reproyección: debería ser menor a 1 píxel. Podés verlo en el reporte de procesamiento (Herramientas → Reporte de procesamiento).
- Cobertura de cámaras alineadas: al menos el 90% de las fotos importadas deberían haberse alineado. Si el porcentaje es menor, revisá la calidad de las imágenes y el solapamiento.
- Distribución de las cámaras: en la vista 3D, las posiciones de cámara deben formar la trayectoria esperada sin cámaras «sueltas» o muy alejadas del grupo.
Si el error de reproyección es mayor a 1 píxel, optimizá las cámaras antes de continuar: Herramientas → Optimizar Cámaras. Habilitá los parámetros f, cx, cy, k1, k2, k3 y p1, p2 para obtener mejores resultados.
📷 Idea de imagen (IA): Vista 3D de una nube de puntos dispersa con las posiciones de cámara representadas como íconos pequeños formando una trayectoria en U sobre un objeto, estilo visualización técnica sobre fondo oscuro.
Paso 2: Generar la nube de puntos densa
Con las cámaras alineadas, andá a:
Flujo de trabajo → Construir nube de puntos densa
Se abre el diálogo de configuración con los siguientes parámetros principales:
Calidad
La calidad determina a qué resolución se procesan las imágenes para calcular los mapas de profundidad.
| Calidad | Resolución de procesamiento | Tiempo estimado* | Cuándo usarla |
|---|---|---|---|
| Ultra Alta | Resolución original (1:1) | Muy largo | Objetos pequeños, máximo detalle, patrimonio cultural |
| Alta | Mitad de la resolución (1:2) | Largo | Proyectos profesionales estándar, topografía |
| Media | Un cuarto de la resolución (1:4) | Moderado | Proyectos grandes, primera revisión |
| Baja | Un octavo de la resolución (1:8) | Corto | Solo para pruebas rápidas |
| Más baja | Un dieciseisavo (1:16) | Muy corto | Solo diagnóstico |
*El tiempo varía considerablemente según el hardware, especialmente la GPU y la RAM disponibles.
Recomendación práctica: para la mayoría de proyectos profesionales, Alta es el balance óptimo entre calidad y tiempo de procesamiento. Ultra Alta solo se justifica cuando el detalle milimétrico es crítico o cuando el objeto es pequeño y las imágenes son pocas.
Filtrado de profundidad
Controla cómo se manejan los puntos inconsistentes o ruidosos durante la generación.
| Filtrado | Cuándo usarlo |
|---|---|
| Suave (Mild) | Superficies complejas, vegetación, objetos irregulares. Conserva más puntos, incluidos bordes finos |
| Moderado (Moderate) | Uso general. Buen balance entre densidad y limpieza |
| Agresivo (Aggressive) | Superficies lisas y regulares como interiores, pistas o terrenos abiertos. Elimina más ruido pero puede perder detalles finos |
Calcular confianza del punto
Activar esta opción (Calculate point confidence) asigna a cada punto un valor de confianza (0–255) que indica qué tan fiable es su posición calculada. Es muy útil si planeás filtrar puntos de baja calidad después del procesamiento. Se recomienda activarla siempre.
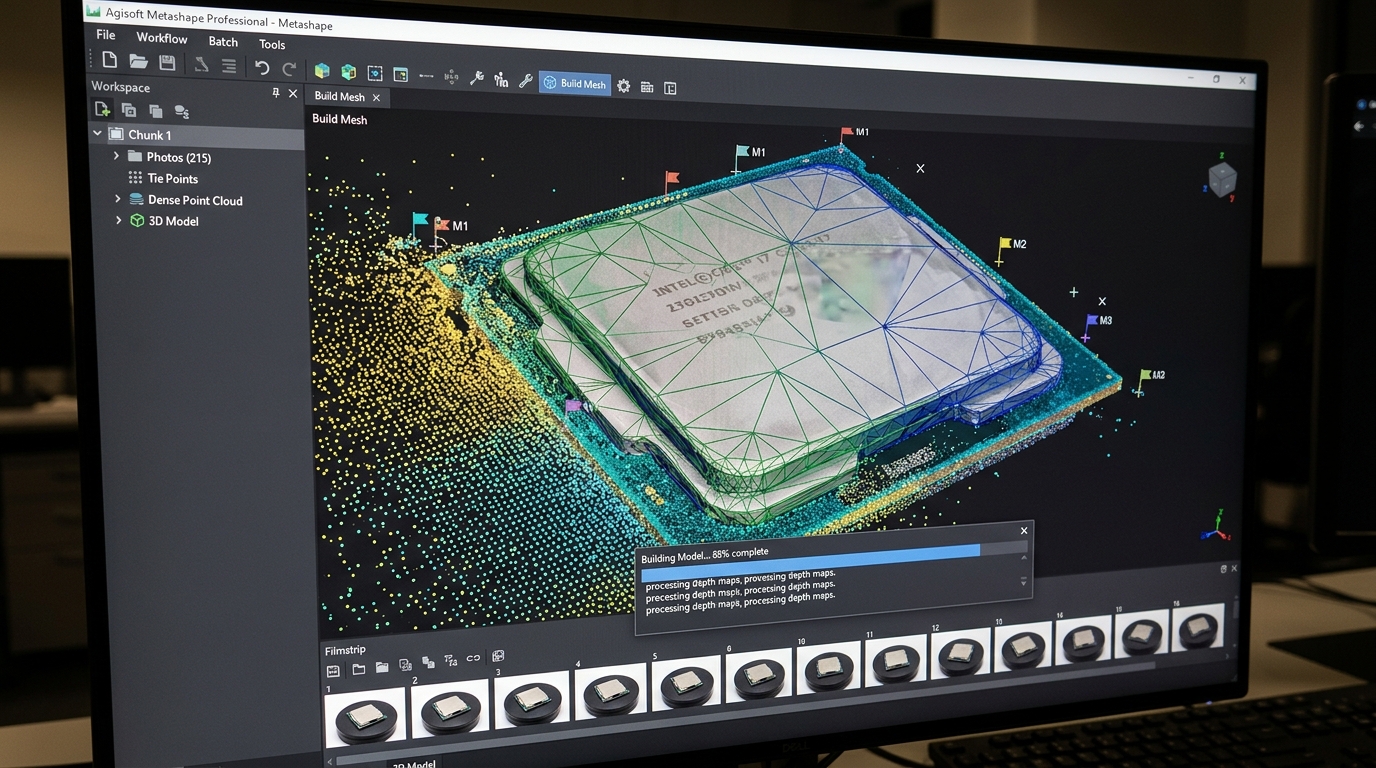
📷 Idea de imagen (IA): Captura estilizada del diálogo de configuración «Construir nube de puntos densa» de Metashape, con los parámetros visibles, sobre un fondo de interfaz oscura.
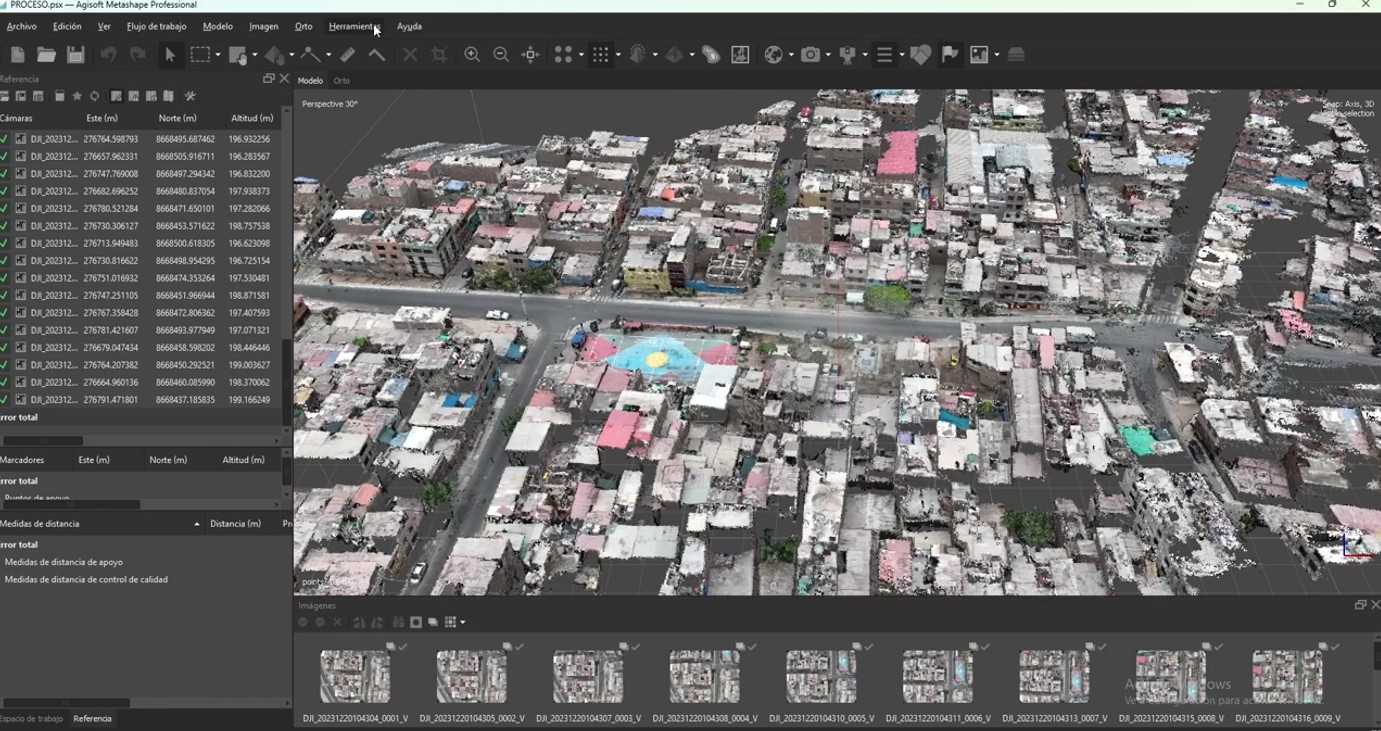
Paso 3: Evaluar la nube de puntos generada
Una vez terminado el procesamiento, antes de pasar a la siguiente etapa, examiná la nube densa:
Qué buscar:
- Cobertura completa: toda la zona de interés debe estar representada sin huecos importantes.
- Densidad uniforme: la densidad de puntos debe ser homogénea. Zonas más claras o dispersas indican problemas de solapamiento o superficies problemáticas.
- Ausencia de artefactos evidentes: puntos flotantes, superficies duplicadas o «fantasmas» de objetos en movimiento.
Si encontrás problemas graves de cobertura, lo más efectivo es agregar más fotos de las zonas deficientes y reprocesar. Si el problema es ruido, la edición manual (paso siguiente) puede solucionarlo.
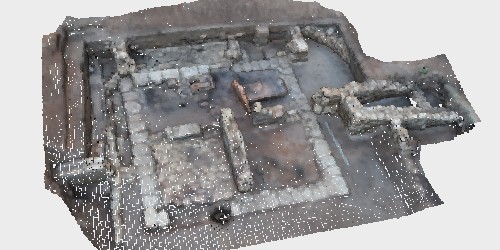
📷 Idea de imagen (IA): Nube de puntos densa de un edificio histórico o puente, millones de puntos con degradé de colores RGB sobre fondo negro, estilo visualización científica.
Paso 4: Editar la nube de puntos (limpieza)
Metashape ofrece herramientas para editar manualmente la nube de puntos densa y eliminar puntos no deseados antes de generar productos derivados.
Selección manual
Usá las herramientas de selección del panel de herramientas:
- Rectángulo / Lazo / Polígono: seleccionan puntos dentro de un área dibujada en la vista 3D.
- Selección libre: permite dibujar una región de selección irregular.
Una vez seleccionados los puntos a eliminar, presioná Suprimir para borrarlos. Esto es ideal para remover:
- Puntos del suelo que no son parte del objeto de interés
- Vegetación que rodea una estructura
- Puntos generados por objetos en movimiento (personas, vehículos)
- Nubes de puntos de zonas fuera del área de trabajo
Tip: Antes de editar, duplicá el chunk (clic derecho sobre el chunk → Duplicar chunk). Así podés revertir los cambios si algo sale mal, sin necesidad de reprocesar.
Filtrado por confianza
Si activaste «Calcular confianza del punto» en el paso anterior, podés filtrar rápidamente los puntos menos confiables:
Herramientas → Nube de puntos densa → Filtrar por confianza
Ajustá el umbral mínimo de confianza (por ejemplo, eliminar todos los puntos con confianza menor a 2) para limpiar el ruido de forma automática sin intervención manual punto a punto.
📷 Idea de imagen (IA): Comparación lado a lado: izquierda nube de puntos con ruido y puntos flotantes, derecha la misma nube limpia y uniforme, fondo oscuro, estilo técnico.
Paso 5: Clasificar la nube de puntos (solo Professional)
La clasificación es una de las funciones más poderosas de Metashape Professional. Permite asignar a cada punto una categoría semántica, de modo que los productos derivados (especialmente el DEM/DTM) puedan generarse solo a partir de los puntos relevantes.
Herramientas → Nube de puntos densa → Clasificar puntos de tierra
Clases de puntos disponibles
| Clase | Descripción |
|---|---|
| Terreno (Ground) | Puntos del suelo desnudo |
| Vegetación baja | Césped, arbustos bajos |
| Vegetación media | Arbustos de altura media |
| Vegetación alta | Árboles |
| Edificios | Estructuras construidas |
| Sin clasificar | Puntos no asignados a ninguna clase |
Parámetros de clasificación de terreno
| Parámetro | Descripción |
|---|---|
| Ángulo máximo | Inclinación máxima del terreno (en grados). Aumentarlo permite clasificar como terreno zonas más inclinadas |
| Distancia máxima | Distancia máxima entre puntos del terreno y la superficie estimada |
| Tamaño de celda | Resolución de la grilla de análisis. Valores menores = más precisión, más tiempo |
Después de la clasificación automática, podés refinar manualmente usando las herramientas de selección para reclasificar puntos individuales o regiones específicas.
La clasificación de puntos de terreno es indispensable para generar un DTM (Modelo Digital del Terreno) que represente solo el suelo sin vegetación ni edificios, a diferencia del DSM (Modelo Digital de Superficie) que incluye todo.
📷 Idea de imagen (IA): Nube de puntos clasificada con colores por clase: marrón para terreno, verde para vegetación, gris para edificios, sobre fondo negro, estilo GIS profesional.
Paso 6: Exportar la nube de puntos
Con la nube procesada, editada y clasificada, el último paso es exportarla al formato adecuado para el software de destino.
Archivo → Exportar → Exportar nube de puntos
Formatos de exportación disponibles
| Formato | Extensión | Cuándo usarlo |
|---|---|---|
| LAS | .las | Estándar de la industria para nubes de puntos geoespaciales. Compatible con ArcGIS, QGIS, CloudCompare, AutoCAD Civil 3D |
| LAZ | .laz | Versión comprimida de LAS. Mismo contenido, hasta 10× menos espacio en disco |
| PLY | .ply | Para uso en software 3D (Blender, MeshLab) |
| XYZ / TXT | .txt | Formato de texto simple, coordenadas separadas por espacio o coma. Compatible con casi todo |
| PTS | .pts | Compatible con software de escaneo láser (Leica Cyclone, etc.) |
| E57 | .e57 | Estándar para datos de escaneo 3D, compatible con BIM y software de relevamiento |
Opciones de exportación importantes
Sistema de coordenadas: si el proyecto está georreferenciado (con GCPs o GPS), elegí el sistema de referencia correcto para el destino. En Argentina, los más comunes son WGS84, POSGAR 07 o las proyecciones Gauss-Krüger correspondientes.
Guardar colores: activá esta opción para preservar los valores RGB de cada punto, esenciales para visualización.
Guardar clases de puntos: si clasificaste la nube, activá esta opción para que las clases queden guardadas en el archivo LAS/LAZ exportado y sean reconocibles por el software de destino.
Guardar confianza: exporta el valor de confianza como atributo adicional de cada punto.
Errores comunes y cómo resolverlos
La nube densa tiene muchos huecos Causa más frecuente: solapamiento insuficiente entre imágenes. También puede deberse a superficies sin textura (agua, vidrio, metal pulido) o zonas fotografiadas desde un solo ángulo. Solución: agregar fotos complementarias de las zonas problemáticas y reprocesar.
La nube tiene demasiado ruido o puntos flotantes Causa: imágenes de baja calidad, movimiento durante la captura, reflejos o zonas con poca luz. Solución: usar filtrado de profundidad Moderado o Agresivo, filtrar por confianza y limpiar manualmente con las herramientas de selección.
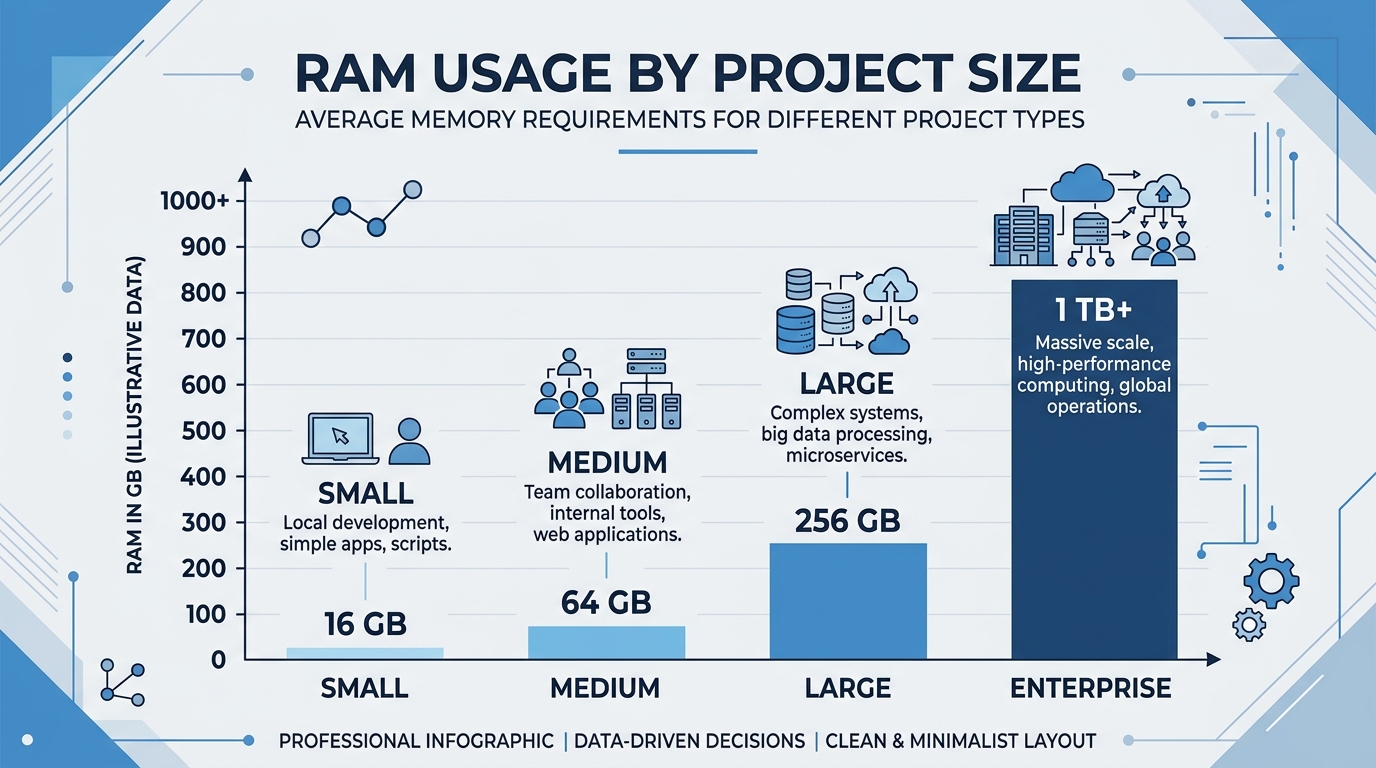
El procesamiento es muy lento o el equipo se queda sin memoria Causa: proyecto demasiado grande para el hardware disponible o calidad configurada demasiado alta. Solución: reducir la calidad a Media, dividir el proyecto en chunks más pequeños o agregar más RAM al equipo.
La clasificación de terreno no funciona bien en zonas con vegetación densa Causa: en bosques o zonas con cobertura vegetal muy densa, pocos rayos láser (o fotogramétricos) llegan al suelo real. Solución: ajustar el ángulo máximo y el tamaño de celda, y complementar con clasificación manual en las zonas problemáticas.
Los puntos exportados no tienen coordenadas correctas Causa: el proyecto no fue georreferenciado con GCPs o el sistema de coordenadas de exportación no coincide con el esperado. Solución: verificar que los GCPs estén correctamente marcados y que el sistema de coordenadas del panel de Referencia sea el correcto antes de exportar.
Conclusión
Procesar correctamente la nube de puntos en Metashape no es solo presionar un botón. Elegir la calidad adecuada según el proyecto, limpiar los puntos problemáticos, clasificar el terreno para proyectos GIS y exportar en el formato correcto son decisiones que impactan directamente en la calidad de todos los productos derivados.
Si estás comenzando con fotogrametría o evaluando si Agisoft Metashape se adapta a tu flujo de trabajo, en Aufiero Informática podemos asesorarte sin compromiso.
👉 Ver licencias de Agisoft Metashape en Aufiero Informática
Preguntas frecuentes
¿Cuánto tiempo tarda generar una nube de puntos densa? Depende del hardware y los parámetros. Como referencia: 300 fotos a 20 MP en calidad Alta con una GPU RTX 4070 tarda aproximadamente 45–90 minutos. En calidad Ultra Alta, ese tiempo puede triplicarse.
¿Puedo generar la nube densa sin GPU? Sí, pero la diferencia de velocidad es muy significativa. La GPU acelera el cálculo de mapas de profundidad, que es la operación más intensiva de esta etapa. Sin GPU dedicada, proyectos medianos pueden tardar muchas horas.
¿La nube de puntos densa reemplaza al escaneo LiDAR? Para muchas aplicaciones sí, especialmente cuando no se necesitan datos bajo cobertura vegetal densa. La fotogrametría genera nubes con textura (color RGB por punto), lo que el LiDAR no hace por defecto. Para penetración de dosel forestal, el LiDAR sigue siendo superior.
¿Puedo editar la nube de puntos densa después de haber generado la malla? Sí, la nube y la malla son productos independientes. Podés editar la nube y regenerar la malla sin necesidad de repetir la alineación de fotos.
¿Qué diferencia hay entre DSM y DTM? El DSM (Modelo Digital de Superficie) incluye todos los objetos sobre el terreno: edificios, vegetación, infraestructuras. El DTM (Modelo Digital del Terreno) representa solo el suelo desnudo, y se genera a partir de los puntos clasificados como «terreno» en la nube de puntos.